Hopefully, some of you have already had the opportunity to audition the recently published presentation done by Jonathan Epstein, Omek Interactive's President, at the late March Embedded Vision Alliance Summit:
Jonathan spoke at length about Beckon, one of the two primary gesture interface middleware-and-tools products supported by the company, the other being Grasp. In both products, the company has focused on supporting 3-D (i.e. depth-discerning) image sensor subsystems, thereby differentiating Omek from fellow Embedded Vision Alliance member eyeSight, who supports conventional 2-D image sensor implementations. The primary differentiation between Beckon and currently-in-alpha Grasp is as follows:
- Beckon: full body tracking and gesture interfaces at ranges from 1 to 5 meters
- Grasp: hand and finger tracking and gesture interfaces at ranges of 1 meter or less
The Beckon for Windows SDK is currently offered at the v3.0 beta level, on the company's website, as introduced in early April. However, last weekend Omek also unveiled the v2.4 SDK for the BeagleBoard-xM. The BeagleBoard-xM is based on Alliiance member Texas Instruments' DM3730 SoC, and the core Beckon tracking engine runs on the DM3730's integrated DSP core, freeing up the ARM CPU core and the GPU for other functions. Beckon supports sensors from PrimeSense, ASUS, Panasonic, and Microsoft (Kinect).
Omek's Beckon BeagleBoard-xM Edition includes a development system that runs on an Ubuntu-based PC, along with a runtime image of the Beckon engine that runs under Ångstrom on the BeagleBoard-xM. You can either execute your gesture-enabled applications directly on the DM3730's ARM processor or use Beckon’s NetServer to run gesture recognition on the BeagleBoard-xM and control applications running on a different computer on the network.
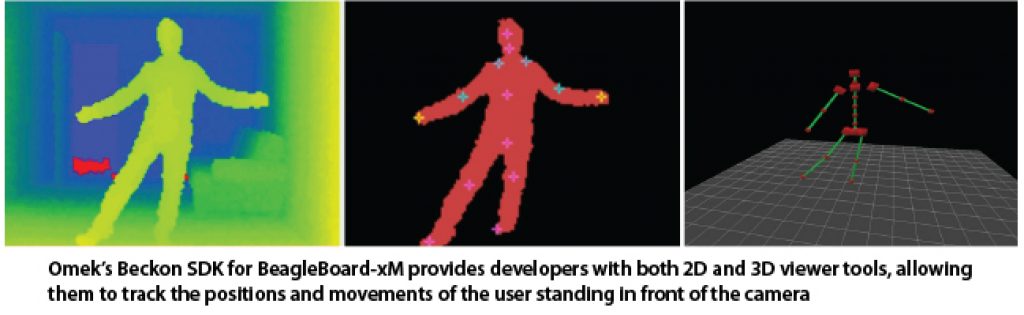
Beckon BeagleBoard-xM Edition includes the Beckon engine, the Beckon API, tools and utilities to assist in development, and detailed documentation to help you get up and running more quickly. Beckon BeagleBoard-xM Edition features two modes for users to develop, an “upper-body” mode which tracks 15 joints, and a “full-body” mode which tracks 23 joints. Beckon, BeagleBoard-xM Edition also includes the Beckon NetServer sample code, which demonstrates how to use the Beckon gesture engine over the network.