
This blog post was originally published at e-con Systems’ website. It is reprinted here with the permission of e-con Systems.
Multiple Camera Interference (MCI) is one of the biggest challenges faced by multi-camera setups – powered by Time-of-Flight (ToF) technology. So, avoiding light interference between two or more TOF cameras becomes very crucial. Read our blog to discover three ways to overcome the MCI problem.
As you may be aware, Time of Flight (ToF) cameras operate by transmitting the light source and receiving the reflected light source. It ensures they calculate the depth based on the reflected light intensity and the time taken for the light to return to the camera. So, they can empower embedded vision applications to leverage the real-time depth and visual information to capture and use high-quality imaging data. These cameras have seen wide adoption in recent years, especially in the industrial sector, with systems like Modern Automated Guided Vehicles and Autonomous Mobile Robots playing significant roles.
However, one of the biggest challenges Time-of-Flight (ToF) faces is multi-camera interference (MCI). In this blog, you’ll discover why MCI is such a big thorn in the side of ToF technology – and how you can overcome it.
What is Multiple Camera Interference (MCI)?
Multiple Camera Interferences occur when you have two or more TOF cameras operating in the same environment with the same frequency. The light transmitted from one camera will be received by another camera – resulting in depth errors and affecting the TOF functionality.
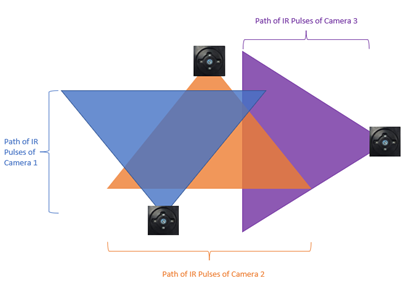
Fig 1: Multiple Camera Interference (MCI)
In real-world scenarios, many use cases require the deployment of multiple TOF cameras in order to capture all the required details. For instance, this is very evident in AMR used for warehouse maintenance. Multiple AMRs equipped with TOF cameras move inside confined environments in such cases.
Therefore, as discussed earlier, it can trigger Multiple Camera Interference-related issues. Obviously, to avoid this, all the TOF cameras must operate without causing interference with another.
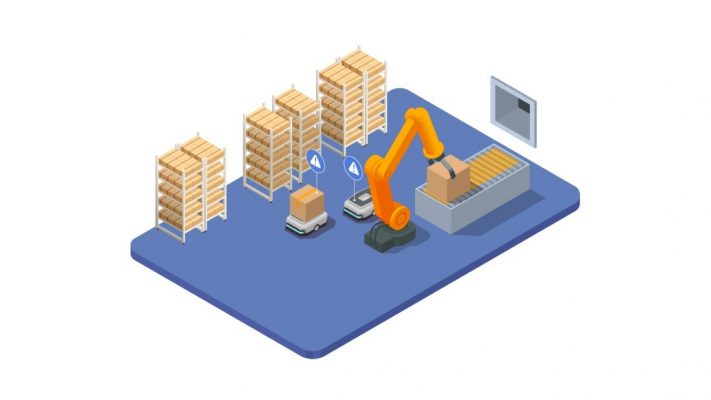
Fig 2: Autonomous Mobile Robots in Warehouse
Overcoming the challenges of Multiple Camera Interference first involves avoiding the light interference between two or more TOF cameras. You can do so by following the below steps.
- Place the camera at different angles
- Operate cameras at different frequencies
- Operate cameras with the same frequency at different time intervals
Let’s look at each of these steps in detail.
3 ways to overcome the challenges of Multiple Camera Interference
1. Place cameras at different angles
As multi-camera interference occurs when the FOV of two cameras meet each other, you can position the cameras in such a way that they are separated far away to avoid interference. So, you can focus different targets on the same environment, which will avoid the FOV intersection of two cameras.
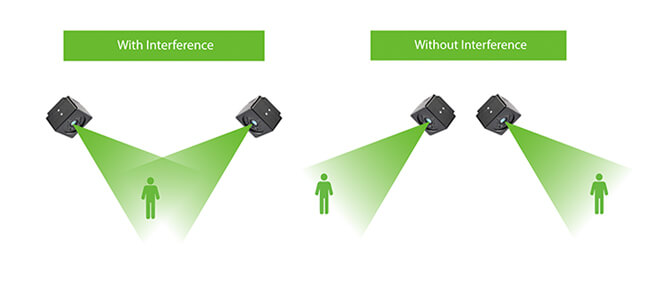
Fig 3: With & Without Interference
2. Operate camera at different frequency
Another way to combat Multiple Camera Interference is to operate the TOF cameras at varying frequencies. This can avoid light interference between two cameras. For example, e-con Systems’ DepthVista (ToF camera series) supports two depth range modes – Near and Far. These modes operate at different frequencies, respectively. The former facilitates depth measurement from 0.2m to 1.2 m, while the latter operates from 1m to 6m.
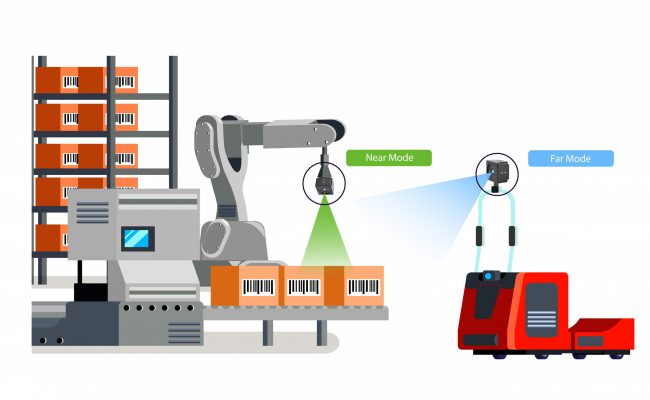
Fig 4: Far & Near Mode in ToF
However, the above two methods can only be used for very specific use cases – considering their limitations on depth range, as well as the need for positioning the camera at different angles.
Hence, to address other use cases, let’s explore the third way to avoid Multiple Camera Interference challenges.
3. Operate cameras with the same frequency at different time intervals
Operating the TOF cameras at different time elapses is an effective approach to eliminating interference-related problems. To achieve this, you can start one of the TOF cameras at the 0th time. After the first TOF camera starts operations by transmitting and receiving the IR light pulses, you can initiate the second TOF camera stream (which will operate in the idle state of the first TOF camera). Similarly, you can start the third TOF camera stream when both the first and the second TOF cameras are in their idle states.
So basically, you can stream a limited number of TOF cameras without interference. You can also try to increase the number of TOF cameras by compensating the frame rate to stream interference-free.
For example, in e-con’s DepthVista far-range depth mode, you can stream two TOF cameras without interference at 30 fps. At 10 fps, you can stream up to five TOF cameras.
e-con Systems’ DepthVista – a state-of-the-art ToF camera series
As previously mentioned, e-con Systems’ DepthVista is a Time-of-Flight camera series that comes with two operational modes – the close-range mode and the far mode. These cameras can provide the depth information and RGB data in one frame – ensuring simultaneous depth measurement and object recognition. DepthVista also comes with a 3D depth sensor to stream video data at a high resolution of 640 x 480 @ 30fps. Other features include:
- Works in the NIR range (940nm/850nm)
- Houses an AR0234 color global shutter sensor from onsemi® that streams HD and FHD @30fps
- Uses a VCSEL of 850nm – enables your system to operate even in absolute darkness
- Leverages multiple interfaces – USB, MIPI & GMSL
Visit our webpage to see the full list of 3D Depth cameras.
If you need help integrating e-con Systems’ Time-of-Flight camera into your application, please write to us at [email protected].
Prabu Kumar
Chief Technology Officer and Head of Camera Products, e-con Systems