“When 2D Is Not Enough: An Overview of Optical Depth Sensing Technologies,” a Presentation from Ambarella
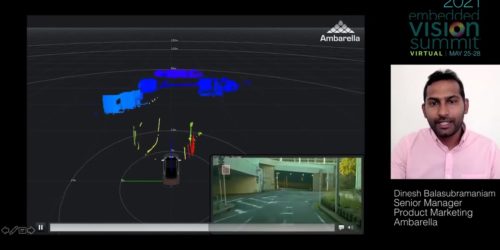
Dinesh Balasubramaniam, Senior Product Marketing Manager at Ambarella, presents the “When 2D Is Not Enough: An Overview of Optical Depth Sensing Technologies” tutorial at the May 2021 Embedded Vision Summit. Camera systems used for computer vision at the edge are smarter than ever, but when they perceive the world in 2D, they remain limited for […]